Robot Ruckus 2019

We didn’t do as well in the rankings as we had hoped, but the event was still quite successful. We learned a lot about the good and bad of our bot concepts, and it made me feel really good about our bot concepts going forward.
Match Footage
What We Learned
Lets break down our performance at RR2019.
Halo
Halo had an overall record of 1-2. This is not great compared to last year, but it I’m not reading too far into it. The judges decision in match 3 was controversial, and I think with the things we learned we can start to develop Halo into a mature, ass-kicking bot.
The good
Halo, of course, was as destructive as ever. We fought mostly wedges in RR2019, and we were still able to immobilize most of them. I don’t see any issues with the maximum energy or weapon engagement.
Once Halo got spinning, it was basically unstoppable. Wedges get punted across the arena after contact, giving Halo time to spin up again. It’s really difficult to pin Halo once this starts happening. This forces a wedge bot into the defensive for the rest of the match.
Twice during RR2019, Halo lost a wheel, and was relatively unaffected. I even got it out of a corner on one wheel during the rumble. It goes to show that the fundamental concept of Halo lends a lot to its effectiveness.
The Bad
Self-Destruction
Halo has a habit of losing parts for the first couple matches. It’s kind of a game of wack-a-mole, every new record-setting hit means something new breaks. We’ve fixed things every time they’ve come up, but to be really successful in a competition it needs to not happen in the first place. Lets review what has broken and how we fixed it:
MFO 2018: Xbee + Teensy comes out of their sockets (fix: lock in with epoxy). Connectors shear off the board (fix: direct solder connections only). Aluminum frame cracks and bends (fix: new tooth geometry).
Bugglebots 2: <redacted>
Now for Robot Ruckus 2019, we have:
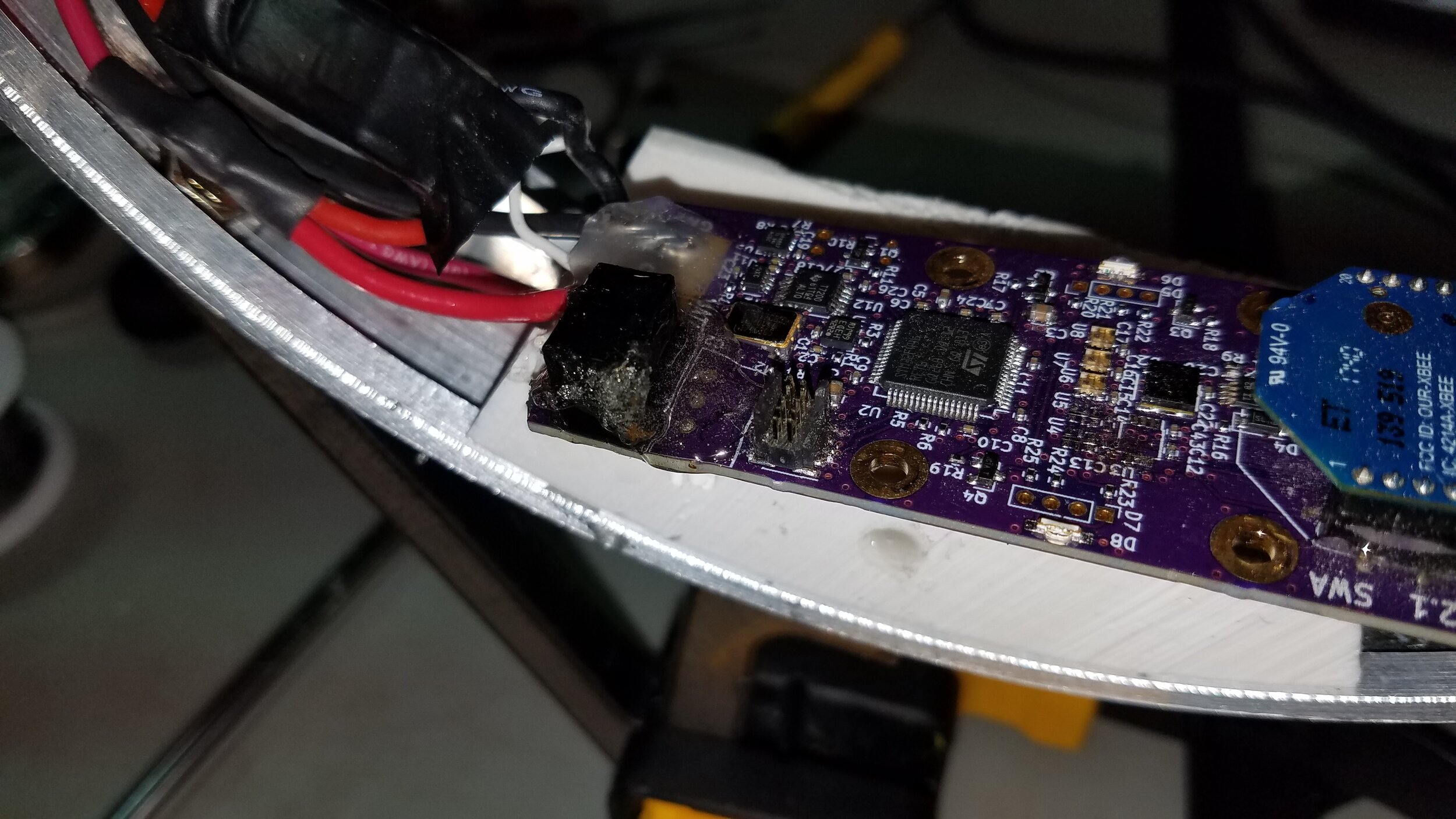
Radio header solder joint crack: the stencil method doesn’t deposit enough solder for these big headers. I need to solder this with an iron from now on.
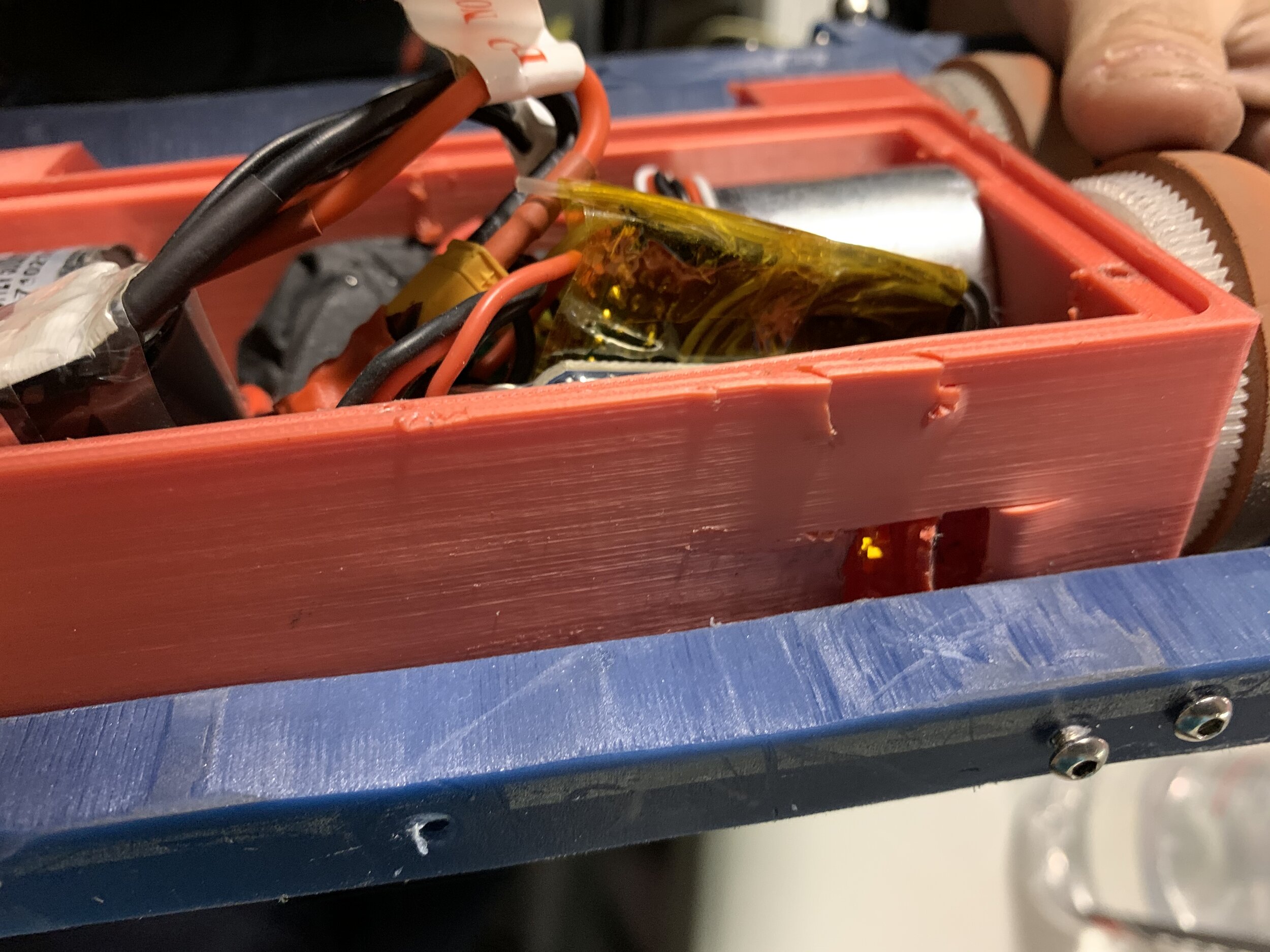
Voltage regulator pin shear: looking at options here. Easy method is just add more epoxy, but I’m also looking at new regulator modules. For either option, more epoxy.
Controller mount crack: new print materials, new print direction (layer lines tangential to ring).
How do we fix it really?
Like I said, fixing spot issues isn’t good enough. We need to take a look a the root of all of this and see if we can prevent spot issues in the future.
Epoxy is a common theme here. I think I need to bite the bullet and start potting the board, which basically means covering the entire board in epoxy. I’ve only done spot epoxy before, because once the board is potted you can’t repair any solder connections or replace any parts. But the electronics are mature enough that I think potting is a reasonable thing to do. Once potted, components shearing off should be a thing of the past.
It’s time to retire PLA as a building material. Our assumption was that it was fine for parts not seeing direct combat, but at this point every 3d printed part has cracked at some point or another. Moving forward, every Halo component must be printed out of something stronger.
Controls issues
Our new corner-mount beacon actually does an excellent job reaching the whole arena. For once, the reference lock wasn’t an issue.
Instead, the control issues at RR2019 were due to a lack of testing.
For instance, Halo worked great until it was flipped upside down. After that my left-right got reversed! There is no good reason for that to happen other than it not being tested enough. We only got Halo spinning a couple days before RR2019, and it really showed. I was finding edge cases in the control code during matches, which is unacceptable. It can be argued my driving mistakes early in my third match cost Halo the whole tournament.
How do we fix it really?
The real culprit is a lack of time before RR2019. Getting two bots ready was tougher than expected. We need to ensure we have more time to test before tournaments in the future, and perhaps that means pulling some bots out. I would rather have one great bot than two mediocre ones.
Hit ‘N Spin
Hit ‘N Spin had a record of 2-2. Not bad for a totally new robot concept!
The Good
Like Halo, Hit ‘N Spin struck fear in it’s opponents. You can catch an audible sigh of relief from our opponent after its fourth match!
The reason why is likely that it’s impossible to threaten the “squishy” parts, such as the wheel or electronics. The reach of the blade is just too far. On top of that, it has the “can’t be stopped” quality of Halo. After a hit, Hit ‘N Spin can spin back up before an opposing wedge can recoup. The only way to win against it is to survive until the end.
In terms of damage dealt, Hit ‘N Spin does not disappoint.


I was very worried about Hit ‘N Spin getting stuck. There are a lot of positions near corners where Hit ‘N Spin can’t spin up, guaranteeing a match loss. But in practice it maintains so much energy after hits that it always bounces back.
The spinup time is exceptional. The one opponent that box-rushed failed to reach us in time. What also helps is the chaotic nature of Hit ‘N Spin’s startup. It always translates pseudo-randomly while it comes up to speed, making it hard for a box rusher to line up correctly.
The Bad
Like Halo, Hit ‘N Spin is prone to self destructing, only worse. The plastic part sometimes sees direct contact (mostly against walls and floors). It also sees some constant strain, as the motor is bolted into the plastic.
As a result, Hit ‘N Spin lost two of it’s matches to the plastic giving out.

How do we fix it?
PLA is right-out for Hit ‘N Spin. I still have faith in the general design of the bot, but I’m looking at Nylon or something carbon reinforced. The catch is I need to insert the titanium mid-print, which imposes restrictions on the printer I can use, but I have a couple ideas moving forward.
{kind=link}
Miscellany
Our beloved AX-2810Q motors have been discontinued by the manufacturer. We are on the hunt for new ones, given we only have three spares left.
The handheld controller is due for a major redesign. I’ll have an entire post for that, stay tuned.
What next?
We will be at RR2020 for sure, but that’s a year away! Bugglebots 3 may not happen if the rumors are true, and I’m not sure we would go even if it did (a lot of hassle). So we’re on the lookout for another competition to attend. Given that flights out of Orlando are cheap, we’re looking anywhere in the US. Or in other words: have robot, will travel.