I just took Halo to its first event, Maker Faire Orlando 2018. The bot performed great, laying down hit after brutal hit, and eventually took second place. You can find all of the match footage below:
I’m going to take this post as an opportunity to summarize the good parts and bad parts in greater detail.
The good
Halo laid down punishment
It’s clear that halo could transfer energy. We were spinning slower than planned, but the improve rotational inertia made up for the lost energy. And the low speed and large weapon gave us enormous bite potential.
Halo took punishment
Even if most of that punishment came from itself, it’s still clear that the monobody design made for a tough bot. I still need to see what a good horizontal spinner would do to us, but the vertical spinners weren’t able to do much to the chassis. There just weren’t any good surfaces to attack.
The motors also proved tougher than I had originally thought. We didn’t have to replace a single one all competition, despite the direct-driven wheels.
Halo was tactically difficult to attack
We could attack in every direction at the same time. This was especially perilous for other spinners, which may not be designed to withstand powerful hits. Against wedge bots, we packed so much energy that even a successful deflection knocked our opponent away. This allowed us to spin back up in between contacts, preventing the wedge bot from pinning us.
Halo looked good
Battlebots is at least 50% showing off, and the LED display made a great show. The pinball action also made for a kinetic, exciting match.
The bad
The beacon has multipath issues
The sensor-fusion system detailed in this blog is great at filtering out spurious reflections, but what we saw in the match were consistent reflections. The result was that the beacon locked on to a random direction. I eventually got used to it and was able to adjust my driving, but it’s clearly not what was intended.
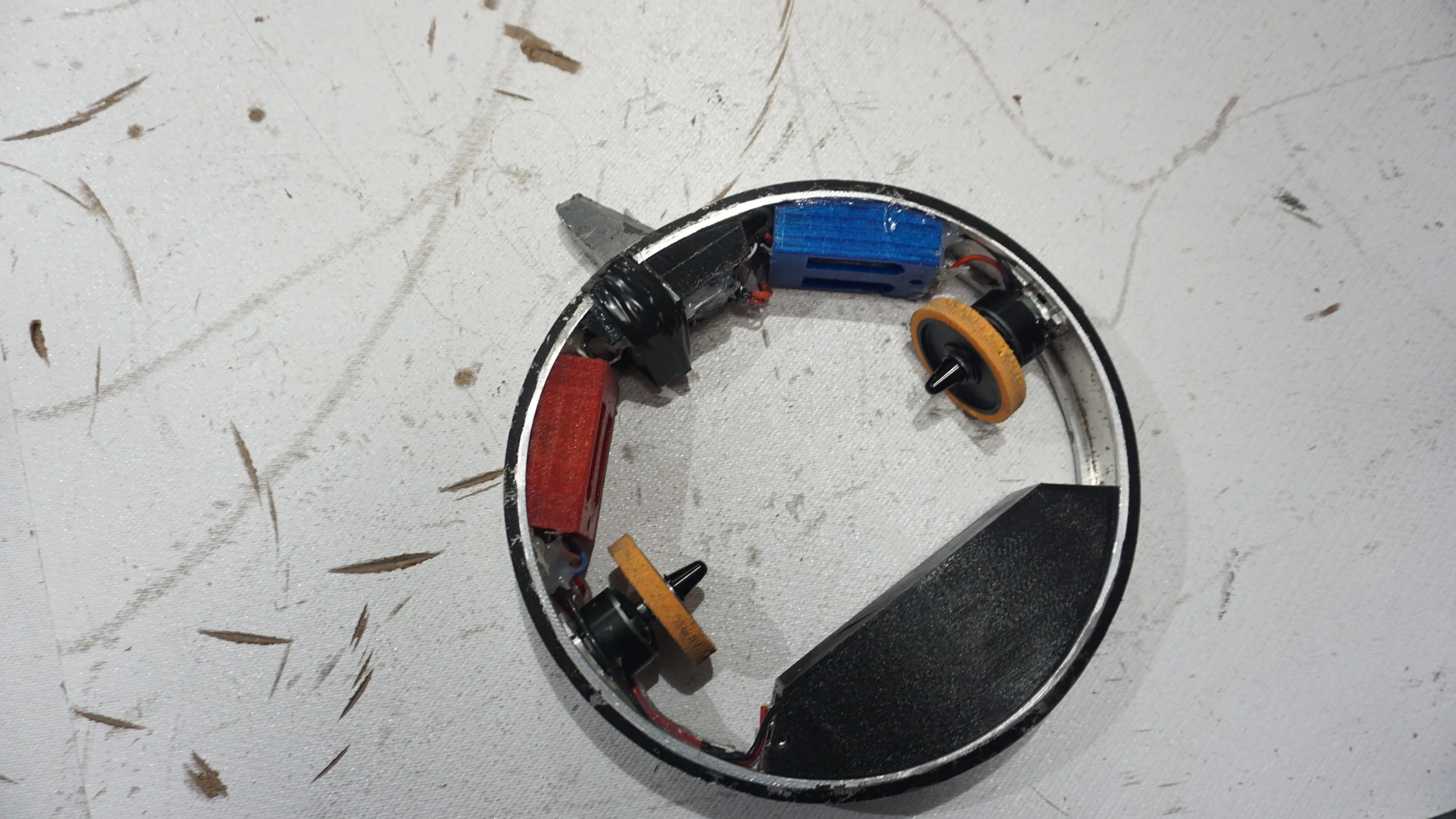
The tooth warps and cracks the chassis around it
Amazingly, the aluminum ring yielded before anything else did. It’s a testament to Pierce’s design and machining ability that it warped in this way, and still laid down punishment. Still, we should shore up the chassis there to prevent this from happening again.
The electrical components were not shock-proof enough
I need to more careful with my component selection and mounting strategies. More epoxy is also good.
The LEDs don’t have the best viewing angle
The LEDs are partially obscured by the modules on the circuit board, and It’s not always easy to see inside the ring. It would be better to find a way to make them shine outwards.
So what’s next?
We feel really good about this design, and other people seem to enjoy it too. So we will continue competing with it.
Of course, we still have a lot of work ahead of us. The ring is a total wash. even though it “survived”, the crack in the chassis would only continue to get worse. The circuit board took too much damage, and would need to be replaced even if we weren’t marking any changes. On top of this, we are looking at some big design changes.
We are changing the absolute reference sensor
I’m not going to remove the infrared beacon entirely. it barely takes any board space or processing power, so we might as well keep it as a backup. I’m currently investigating other methods that can provide an absolute reference, which if feasible will be detailed here.
There also may be a way to make the beacon better. If I offload some extra processing to the microcontroller, I can look for the strongest signal instead of just the first signal. This may be able to ignore reflections entirely.
We are changing the processor
The teensy served us well, but for mechanical shock reasons we should keep the number of plug-in modules to a minimum. I’m currently looking at the STM32 line as a replacement. Regardless of the choice, we will also port the code from arduino to straight C.
We are changing the ESC
The ESC’s we had were wonderful for what they were. They proved robust and powerful. However, if I tried to change the motor speed too much too fast, they would lose track of the motor and reset. This limited how fast I could translate.
I think the best thing to do is add sensors to the motors. This will give me much better control over the motor, improve spin up times, and let me win pushing matches.
The motors will stay the same, I can just add sensors to the outside of the case. But the ESC will have to support sensored operation. So goodbye ReadyToSky 40A.
We are changing the LEDs slightly
I’m investigating ways to make the LEDs shine outwards. I would also like to take advantage of a faster processor and go from five LEDs to seven. This will let me show more detailed images.